Modul 2 LA 1 Prak Up Uc
Percobaan 6 : Motor Servo, LED RGB, & Potensiometer
1. Persiapan Alat dan Bahan:
Alat dan bahan yang dibutuhkan:
Raspberry Pi Pico
.jpeg)
Servo Motor
.jpeg)
Buzzer
.jpeg)
LED RGB
.jpeg)
Potensiometer
.jpeg)
Kabel jumper
.jpeg)
Breadboard
.jpeg)
Sumber daya (misalnya, kabel USB untuk Raspberry Pi Pico)
Software untuk pemrograman Raspberry Pi Pico (misalnya, Thonny IDE dengan MicroPython)
.jpeg)
.jpeg)
.jpeg)
.jpeg)
.jpeg)
.jpeg)
.jpeg)
.
2. Koneksi Rangkaian:
Raspberry Pi Pico:
Hubungkan pin GND Raspberry Pi Pico ke breadboard untuk ground.
Hubungkan pin 5V Raspberry Pi Pico ke breadboard untuk memberikan daya.
Hubungkan pin GP16 Raspberry Pi Pico ke kontrol sinyal servo motor.
Hubungkan pin GP26 Raspberry Pi Pico ke pin tengah potensiometer untuk membaca nilai analog.
Servo Motor:
Hubungkan kabel sinyal (biasanya kabel kuning atau putih) dari servo motor ke pin GP16 Raspberry Pi Pico.
Hubungkan kabel VCC servo motor ke pin 5V Raspberry Pi Pico.
Hubungkan kabel GND servo motor ke ground (GND) pada Raspberry Pi Pico.
Buzzer:
Hubungkan pin positif dari buzzer ke pin GP14 Raspberry Pi Pico.
Hubungkan pin negatif dari buzzer ke GND.
Potensiometer:
Hubungkan pin tengah (wiper) potensiometer ke pin GP26 Raspberry Pi Pico untuk membaca nilai analog.
Hubungkan salah satu pin potensiometer ke 5V Raspberry Pi Pico.
Hubungkan pin lainnya ke GND Raspberry Pi Pico.
3. Pemrograman Raspberry Pi Pico:
Instalasi dan Persiapan:
Pastikan Raspberry Pi Pico terhubung ke komputer dan sudah terdeteksi dengan benar.
Gunakan Thonny IDE untuk menulis kode dalam MicroPython.
Import library yang diperlukan untuk kontrol servo dan membaca nilai dari potensiometer.
Kode untuk Motor Servo dan Potensiometer:
Program Raspberry Pi Pico untuk membaca nilai dari potensiometer dan mengubah posisi motor servo berdasarkan nilai tersebut.
Program buzzer untuk berbunyi ketika nilai potensiometer melebihi batas tertentu (misalnya, jika nilai potensiometer melebihi 512).
4. Uji Coba:
Servo Motor:
Putar potensiometer dan amati bagaimana posisi servo motor bergerak berdasarkan nilai potensiometer. Semakin besar nilai potensiometer, semakin jauh posisi servo bergerak.
Buzzer:
Ketika nilai potensiometer semakin besar, bunyi yang dihasilkan buzzer semakin kecil dan sebaliknya.
- Raspberry Pi Pico

- Potensiometer

- Breadboard

- Jumper male to male

- Buzzer



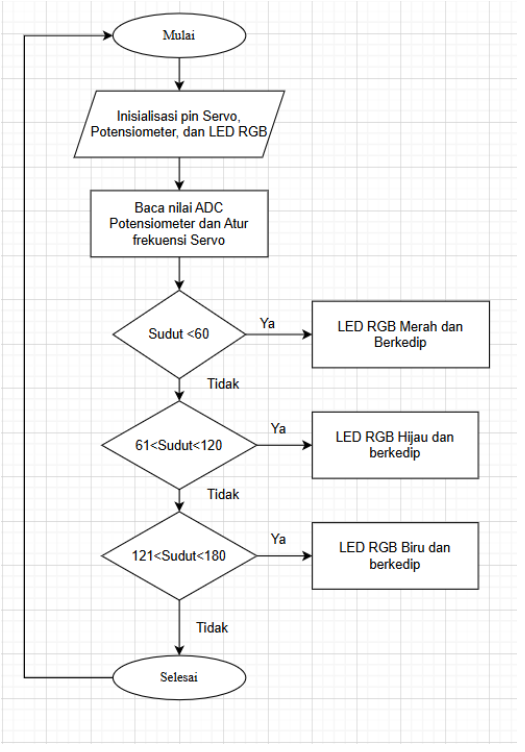
Nilai digital tersebut kemudian digunakan untuk menentukan sudut putaran pada servo motor, yang dikonversi ke dalam rentang sudut antara 0° hingga 180°. Selanjutnya, sudut ini diubah lagi menjadi nilai duty cycle PWM (Pulse Width Modulation) yang berkisar antara 1500 hingga 7500, yang kemudian digunakan untuk mengontrol gerakan servo. Dengan kata lain, posisi servo bergantung langsung pada nilai PWM yang berasal dari putaran potensiometer.
Selain mengatur servo, nilai dari potensiometer juga digunakan untuk mengatur frekuensi buzzer. Nilai ADC yang sama dikonversi menjadi frekuensi audio dalam rentang 200 Hz hingga 2000 Hz. Semakin besar nilai potensiometer, semakin tinggi pula frekuensi suara yang dihasilkan oleh buzzer. Namun, meskipun frekuensinya berubah-ubah, volume suara buzzer tetap konstan karena menggunakan duty cycle PWM tetap sebesar 30000.
Seluruh proses ini berlangsung secara terus-menerus dalam sebuah loop, sehingga sistem akan selalu membaca posisi potensiometer secara real-time dan langsung menyesuaikan output ke servo dan buzzer. Dengan demikian, potensiometer menjadi pengendali utama dalam sistem ini, karena secara bersamaan menentukan sudut gerak servo dan tinggi rendahnya nada suara buzzer.



{kind=link}

.jpeg)

.jpeg)
Komentar
Posting Komentar